

北京大学刘畅研究员团队成果获IEEE T-ASE年度最佳应用奖提名
2026年4月13日,北京大学刘畅研究员团队荣获IEEE Transactions on Automation Science and Engineering(IEEE T-ASE)2025年度最佳应用奖提名(Honorable mention for the T-ASE 2025 Best Application Award)。IEEE T-ASE由IEEE机器人与自动化协会(IEEE RAS)主办,是国际智能控制与优化领域的顶级期刊。该期刊每年评选年度最佳应用奖,其面向在智能控制与优化领域取得突出理论研究成果和技术价值的研究论文。
本次获提名奖的论文题为“Risk-Aware and Scalable Hierarchical Motion Planning for Large-Scale Robotic Swarms via CVaR-Constrained MPC”,其聚焦于复杂障碍环境下大规模机器人集群运动规划的两大难题:一是机器人数量增加后,传统个体级规划计算复杂度迅速上升,难以兼顾实时性与可扩展性;二是在狭窄通道和密集障碍场景中,如何实现碰撞风险的量化及其约束控制。针对现有方法在规模扩展、动力学约束、避障能力和规划灵活性上的不足,论文提出了闭环分层风险感知集群运动规划架构C-ROVER。该方法在宏观层利用高斯混合模型(GMM)表征集群分布,并通过带条件风险价值约束的模型预测控制生成风险感知轨迹;在微观层结合人工势场与分布式模型预测控制,实现个体机器人的轨迹跟踪与避障避碰,并通过实际位置反馈持续更新集群分布,形成闭环规划控制框架。
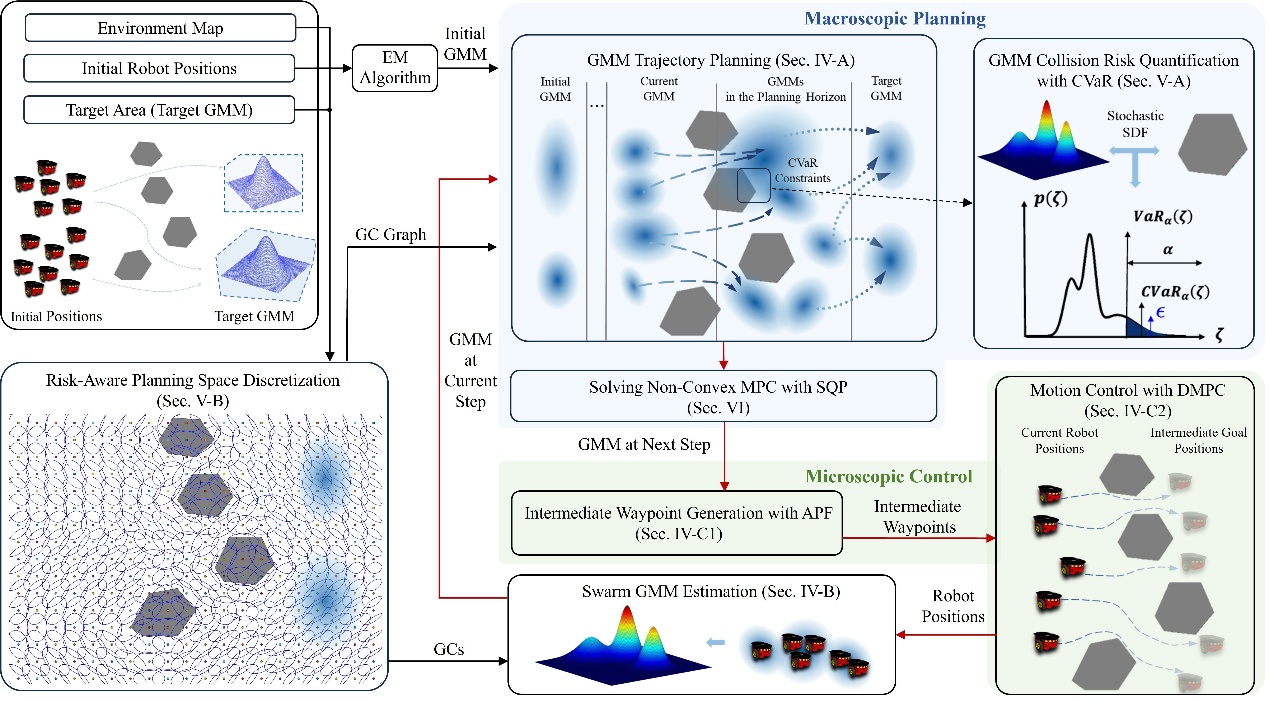
该成果的核心亮点在于大规模机器人集群运动规划可扩展性与风险觉知性的有机统一。论文并未沿用传统逐个机器人求解的思路,而是以GMM对集群整体分布进行表征,在宏观层开展带条件风险价值(CVaR)约束的模型预测控制规划,在微观层结合分布式模型预测控制实现个体机器人的轨迹跟踪与局部避碰,并通过真实机器人位置的周期性反馈持续更新集群分布,从而构建起闭环分层规划与控制架构。与此同时,论文提出了集群GMM分布碰撞风险的解析化CVaR表达、风险感知规划空间离散化以及具有收敛保证的序列优化算法,使系统在复杂障碍和狭窄通道中仍具备较高的安全性、灵活性与实时性。实验结果表明,该方法在仿真和真实系统中均展现出优异的可扩展性与风险感知能力,为大规模机器人集群在复杂环境中的安全自主导航提供了一种兼具理论创新与工程价值的新范式。
刘畅研究员课题组长期围绕机器人具身导航规划与多机器人协同的核心问题开展研究,在语义环境探索导航、交互式导航与集群协同规划控制等领域取得了一系列有特色的研究成果,发表高水平论文50余篇并参与专著1本,授权发明专利4项,积累了坚实的研究基础。研究受到国家自然科学基金优秀青年科学基金项目(海外)、北京市科技新星(创新新星、交叉项目等2项)等项目支持。研究成果获IEEE Transactions on Intelligent Vehicles最佳论文奖、ICCAS最佳学生论文奖、RSS MRS workshop最佳论文提名等奖励。刘畅多次担任机器人领域国际顶会RSS领域主席,IROS副编委,并任人工智能领域高水平期刊《Machine Intelligence Research》的青年编委。
该论文通讯作者为北京大学先进制造与机器人学院的刘畅研究员;硕士生杨栩如(已毕业)、博士生赵宇桥为论文第一作者。共同合作者包括:北京大学先进制造与机器人学院博士生胡韫泽、力学与工程科学学院硕士生杨宗儒、美国马歇尔大学助理教授祝平平与宾夕法尼亚州立大学助理教授孙颖。本项研究得到国家自然科学基金与北京市科技新星项目支持。
论文链接:https://ieeexplore.ieee.org/abstract/document/11313580