

北京大学喻俊志教授团队综述论文发表于nature 合作期刊《npj robotics》
近日,北京大学先进制造与制造机器人学院喻俊志课题组综述论文《Bioinspired underwater soft robots: from biology to robotics and back》在nature 合作期刊《npj robotics》上发表。
海洋中的软体生物以其卓越的运动能力、环境适应性和行为灵活性,为水下机器人研究提供了丰富灵感。本文系统提炼了指导水下软体机器人设计的四大生物学原则:高效运动、柔顺形态与材料、分布式感知以及自适应控制。更重要的是,论文构建了一个“从生物到机器人,再从机器人回到生物”的双向研究闭环——机器人不仅是模仿生物的工程载体,更是探索生物机制的重要物理模型,可帮助揭示许多在活体中难以独立研究的关键过程。在此基础上,作者进一步提出了超越单一生物原型的“生物普适设计”理念,从单纯的“形似”走向深层的“机理互哺”,仿生水下机器人的未来正迈向超越单一物种限制的“通用仿生设计”新纪元。
论文首先提出了一个核心理念:仿生水下软体机器人不应只是单向模仿生物,而应构建一个生物学与机器人学相互促进的闭环。鱼类游动、章鱼柔性操控以及海豹触须感知等生物机制,为机器人设计提供灵感;而机器人则作为可控实验平台,反过来帮助科学家验证和揭示复杂生物行为背后的物理机制。
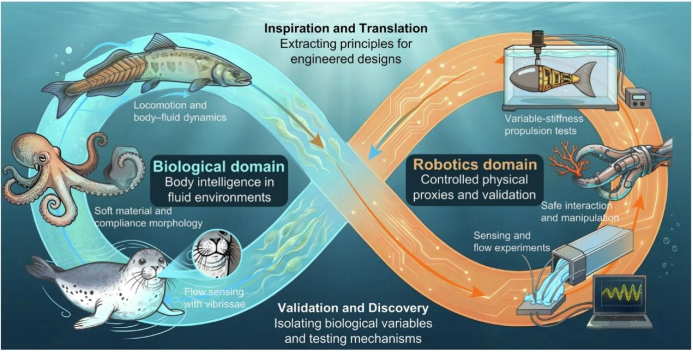
水生生物学与水下软体机器人的双向反馈机制示意图
01 水下软体机器人的生物学基础
水下软体机器人正从“形态仿生”迈向“机理仿生”。自然界水生生物在数亿年演化中形成了高度耦合的运动、结构、感知与控制体系,为机器人设计提供了系统性生物范式。近期研究进一步强调,软体机器人不仅应借鉴生物外形,更应汲取其在流固耦合、材料架构、多模态感知与自适应控制方面的深层机制,以实现更高效、更鲁棒的水下作业能力。
1) 运动与流固耦合
水生动物通过身体变形与流场相互作用实现高效推进。柔性体波、鳍拍动和喷射推进均体现了对非定常流动的主动利用。
2) 形态特征与材料架构
外部形态决定流动特性,内部梯度材料决定力学响应。形态、材料与界面的协同设计是实现高性能的关键。
3) 分布式传感与环境感知
鱼类侧线、鲨鱼电感受器和海豹触须展示了全身感知优势。感知与结构一体化是复杂环境适应的核心。
4) 自适应行为的生物控制机制
生物依靠中央模式发生器、局部反馈和身体动力学协同控制。未来软体机器人将更加依赖具身智能与自主适应。
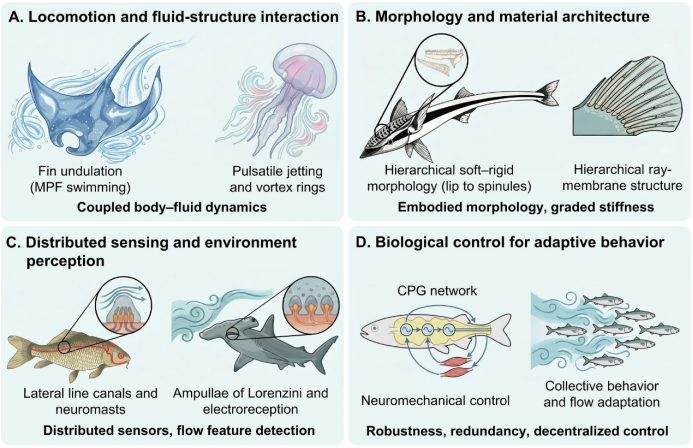
水下软体机器人的生物学演化基础
02 仿生水下软体机器人的设计与实现
水下软体机器人的设计正在从“生物启发”迈向“生物实现”。其核心不在于简单复制生物外形,而在于借鉴水生生物在推进、结构、感知与控制中的设计逻辑。通过形态、材料、传感与智能控制的深度融合,软体机器人正逐步具备接近生物的运动与环境适应能力。
1) 仿生推进与流固耦合
柔性身体和鳍结构取代传统刚性螺旋桨,通过流固耦合实现高效推进。不同推进模式兼顾速度、机动性与环境适应性。
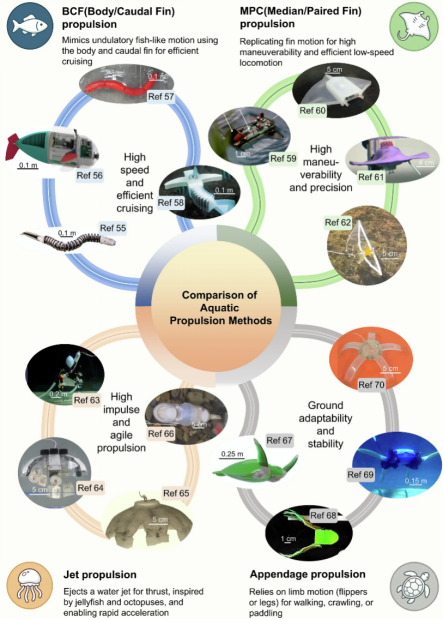
水下软体机器人的仿生推进机理与策略
2) 水下软体机器人的形态与材料架构
水下软体机器人的性能不仅取决于“如何运动”,更取决于“身体如何变形并传递力”。因此,机器人设计通常从整体仿生形态出发,再通过材料分布和结构层次来实现相应功能。
弹性体、水凝胶和智能材料构成了当前水下软体机器人的三大核心材料体系。
3) 水下环境中的软体感知与认知
传感器正从集中式走向分布式,并与柔性结构深度融合。水下软体机器人越来越倾向于将传感能力“嵌入身体”。这种分布式感知方式类似于鱼类侧线、海豹触须和章鱼吸盘,使机器人能够在复杂流场中实现更自然、更高效的环境感知。
4)水下软体机器人的自适应控制与学习
软体机器人的高自由度和强流固耦合特性,使其控制远比刚体机器人复杂。传统精确建模方法往往难以适用,因此研究者开始借鉴生物神经控制机制。
当前主流方法采用分层控制架构:底层通过中枢模式发生器(CPG)生成节律运动,中层实现姿态和形变反馈控制,高层则负责导航与任务规划。同时,强化学习和数据驱动建模正在成为重要工具,使机器人能够在复杂环境中自主优化运动策略。具身智能和分布式控制的引入,则进一步提升了系统的鲁棒性与自主性。
5) 驱动、制造与能源系统集成
驱动决定运动形式,制造决定结构实现,供能决定续航能力。三者协同优化,是实现高性能水下软体机器人的核心基础。
驱动系统是水下软体机器人的动力核心,决定了其运动形式、输出能力和环境适应性。目前常见的驱动方式包括气动、液压、线驱动、形状记忆材料驱动、电活性聚合物驱动以及磁驱动等。
先进制造技术为水下软体机器人的结构实现提供了关键支撑。当前广泛采用的方法包括模具浇筑、软光刻、形状沉积制造以及多材料3D打印等。
能源系统是实现长续航自主运行的关键。从传统锂电池,到氧化还原流电池、磁场供能、光热驱动、微生物燃料电池,甚至生物组织供能,多元化能源方案正在不断拓展水下软体机器人的续航能力与应用边界。
03 机器人反哺生物学:从仿生设计到机制发现
仿生机器人的意义,早已超越“模仿生物”本身。它们不仅是工程技术的展示平台,更是验证生物学假说的重要实验工具。与真实生物相比,机器人具有高度可控、可重复和可量化的优势。研究者可以独立调节刚度、形态、驱动频率和控制策略,从而精确分析这些因素如何影响运动、附着、感知和行为。
这种“生物启发—机器人实现—生物机制验证”的双向循环,正在推动仿生学从经验模仿走向机制科学。特别是在水下领域,机器人已经成为研究流固耦合、附着机理、分布式感知以及古生物运动重建的重要物理模型。它们不仅帮助我们理解现存生物为何“这样设计”,还帮助回答那些仅靠观察难以解决的问题:为什么这种结构有效?哪些参数最关键?自然界为何选择了这种方案?
1) 运动与流固耦合
柔性身体和鳍结构取代传统刚性螺旋桨,通过流固耦合实现高效推进。不同推进模式兼顾速度、机动性与环境适应性。
利用机器人平台探究生物底层运动机制
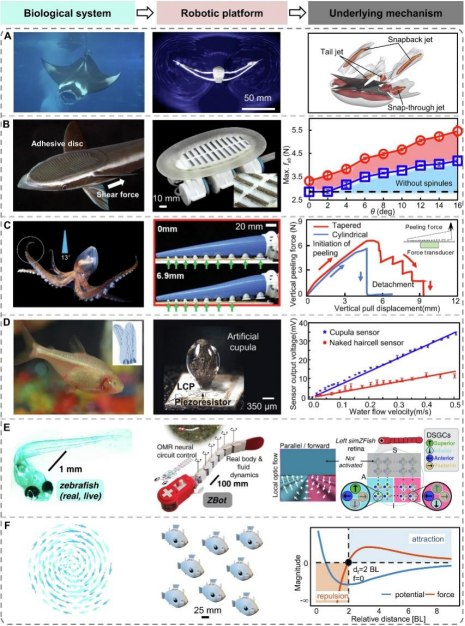
2) 形态与材料在附着中的作用
水生生物在复杂湿润表面的附着能力,来源于形态结构与材料特性的协同作用。仿生机器人使这些复杂因素得以被逐一拆解和定量研究。
仿鮣鱼吸盘研究表明,柔性唇圈、鳍片及微刺结构共同决定了法向吸附力和切向摩擦力;而仿章鱼柔性臂则揭示了锥形几何对“柔顺缠绕”和“抓持力输出”之间权衡关系的关键作用。这些研究不仅解释了自然界高效附着的机制,也为水下抓取和附着装置的设计提供了明确的工程指导。
3) 感知与控制
复杂水环境中的有效行为,往往依赖于分布式感知和简洁高效的控制机制。仿生机器人为研究这一问题提供了独特的具身实验平台。
人工侧线系统揭示了杯状胶帽的形状、刚度和黏弹性如何在信号进入传感器之前完成机械滤波与增益放大;仿海豹触须阵列则展示了结构本身如何抑制自激振动并增强尾迹探测能力。此外,仿鱼机器人和鱼群机器人进一步证明,仅依靠局部感知和简单交互规则,就能够实现稳定定向、群体协同以及尾迹能量利用。这些成果为理解动物群体智能和神经控制机制提供了新视角。
4)演化与古生物学
机器人还为探索已灭绝生物的运动方式和演化功能提供了全新的研究手段。通过将化石形态转化为可运动的物理模型,研究者可以直接测试不同结构和运动模式的力学合理性。
例如,仿古两栖机器人验证了早期四足动物步态的能量效率;仿蛇颈龙四鳍模型证明了前后鳍相位差可显著提升推进性能;仿棘龙尾部模型则支持其具备良好的水中推进能力。此外,基于化石足迹和身体结构构建的机器人,还揭示了软组织力学在运动和足迹形成中的重要作用。机器人由此成为连接古生物形态与功能演化的重要桥梁。
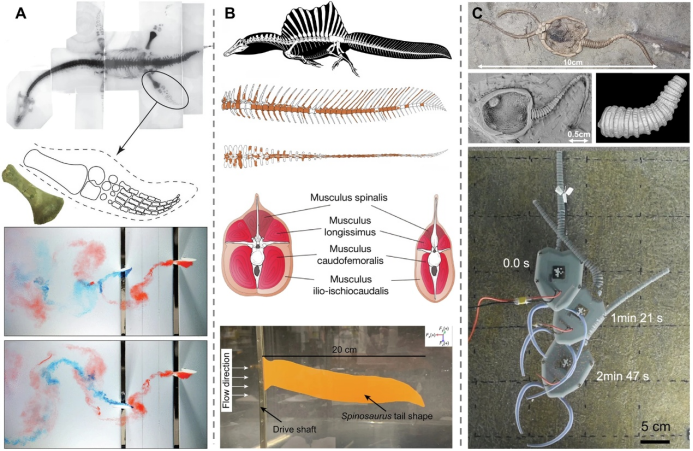
仿生机器人技术在古生物还原研究中的典型案例
04 未来研究方向
1) 跨物种设计准则:迈向生物普适启发式机器人
传统仿生往往聚焦于单一物种,而未来的重要方向,是从多种生物中提炼跨物种共享的设计规律。无论是鱼类、海豚和企鹅共同演化出的流线型身体,还是七鳃鳗、鮣鱼和章鱼独立形成的吸附结构,这些都反映了自然界对相似物理问题的“最优解”。
这种“生物共性启发”设计理念,旨在将趋同演化中的普适规律转化为可迁移、可扩展的工程原则。未来的水下软体机器人将不再局限于模仿某一种动物,而是融合多类生物的优势特征,形成跨尺度、跨环境适用的通用设计框架。
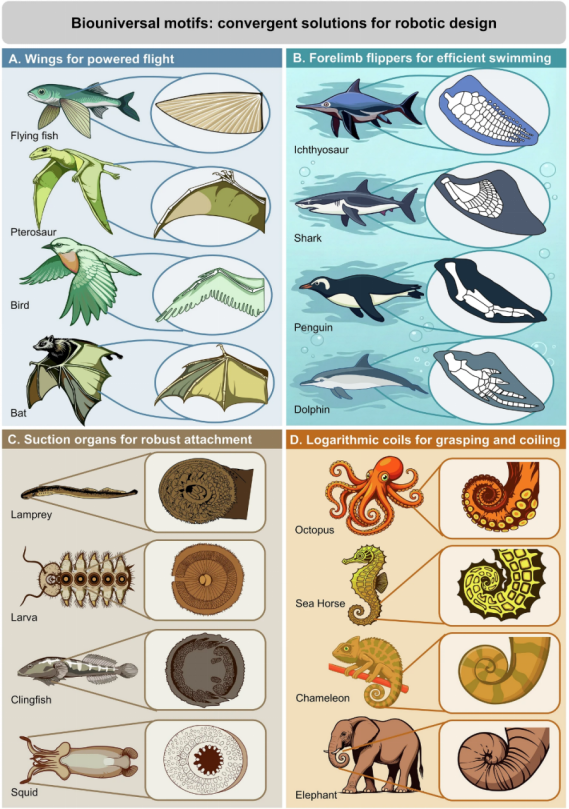
功能需求驱动下的跨物种趋同进化现象
2) 多尺度数字孪生:构建生物—机器人协同设计平台
生物实验与机器人设计之间,仍缺乏统一的连接桥梁。多尺度数字孪生有望填补这一空白。它能够在同一模型中整合生物体和机器人在形态、材料、流固耦合、驱动和控制等方面的关键参数。
借助这一平台,研究者可以实现“生物启发—虚拟设计—实体验证—机制反馈”的闭环迭代。一方面,它能加速机器人结构与控制的优化;另一方面,也能帮助生物学家验证关于运动、附着和感知机制的科学假设,推动仿生学和机器人学的深度融合。
3) 生物混合水下机器人:融合生命与机器的新范式
与纯人工系统相比,生物组织具有高能量效率、自修复和天然适应性等独特优势。生物混合机器人通过将活细胞、微生物甚至完整生物体与人工结构结合,为水下机器人开辟了全新的发展路径。
例如,基于肌肉组织的驱动器可以实现高效柔顺运动,微生物可用于微尺度推进和环境感知,而“半机械生物”则能够直接利用生物体原有的运动和代谢能力。尽管在稳定性、环境适应性和伦理规范方面仍面临挑战,但生物混合系统有望成为下一代高自主、高适应性水下机器人的重要方向。
综述指出水下软体机器人的未来在于打破单向的“生物至机器人”模仿,转而构建双向闭环的研究体系。通过提炼跨物种趋同演化中的通用设计准则,并结合多尺度数字孪生技术,研究者可以在统一的模型空间内实现工程逆向设计与生物假说验证的协同。这种深度耦合的研发模式,不仅能显著提升软体机器人在复杂动态流场中的作业可靠性,更将反哺生物学,深化我们对水生生物运动与感知机制的物理本质认知。
作者团队:
喻俊志教授课题组长期围绕智能仿生机器人、智能控制、具身智能开展研究。
该综述第一作者为北京大学先进制造与机器人学院(简称先机学院)李磊副研究员,共同合作者包括:先机学院博士生秦博扬、力学与工程科学学院硕士生高文卓、中科院水生所硕士生李雁羽、新加坡国立大学博士生张以远、先机学院博士生王博、先机学院孔诗涵助理研究员、中科院自动化所王健副研究员、中科院水生所何德奎研究员。论文通讯作者为先机学院喻俊志教授。
研究受到国家自然科学基金、北京市科技新星计划、河北省自然科学基金、博新计划、中国博士后科学基金等项目支持。
论文链接:
https://doi.org/10.1038/s44182-026-00088-x